
En Resumen
- Investigadores de Carnegie Mellon y NVIDIA desarrollaron ASAP, una técnica que permite a robots humanoides ejecutar movimientos atléticos avanzados, como el tiro fadeaway de Kobe Bryant y la celebración "Siu" de Cristiano Ronaldo.
- ASAP reduce la brecha entre la simulación y la realidad mediante preentrenamiento en entornos virtuales y ajustes dinámicos en el mundo real, logrando una precisión un 52,7% superior a métodos previos.
- A pesar del avance, las limitaciones de hardware aún restringen la fluidez de los movimientos, pero el progreso en robótica humanoide sugiere aplicaciones futuras en deporte, entretenimiento y más.
La Universidad Carnegie Mellon y NVIDIA se han unido para desarrollar una nueva técnica de entrenamiento que permite a los robots humanoides realizar movimientos atléticos complejos con una agilidad sin precedentes, desde la celebración característica de Cristiano Ronaldo con giro en el aire hasta el tiro en suspensión fadeaway de Kobe Bryant.
El framework Aligning Simulation and Real Physics (ASAP) cierra una brecha crítica entre la simulación y la realidad al permitir que los robots humanoides ejecuten movimientos atléticos de alto nivel que anteriormente se consideraban demasiado complejos para las máquinas.
“Los robots humanoides tienen el potencial de una versatilidad sin igual para realizar habilidades de cuerpo completo similares a las humanas”, señalaron los investigadores. “Sin embargo, lograr movimientos ágiles y coordinados de todo el cuerpo sigue siendo un desafío significativo debido a la discrepancia en la dinámica entre la simulación y el mundo real”.
ASAP aborda este desafío a través de un proceso de dos etapas.
2. Cristiano Ronaldo Siuuuuuuu! pic.twitter.com/jkTNvYnKPL
— Min Choi (@minchoi) February 4, 2025
Primero, pre-entrena políticas de seguimiento de movimiento —las reglas algorítmicas que controlan el seguimiento— en simulación utilizando datos de movimiento humano. Luego implementa estas políticas en el mundo real para recopilar datos que ayuden a cerrar la brecha entre la física simulada y la real.
El resultado es un robot humanoide capaz de replicar movimientos característicos de leyendas del deporte, incluyendo la icónica celebración “Siu” de Cristiano Ronaldo (que implica una rotación de 180 grados en el aire), la celebración “Silencer” de LeBron James (que presenta un preciso equilibrio en una sola pierna) y el tiro fadeaway de Kobe Bryant (que involucra saltar y aterrizar en un pie).
Más allá de estos elegantes movimientos deportivos, el robot demostró otras hazañas impresionantes como saltos frontales y laterales de más de 1 metro.
A primera vista, los robots aún pueden parecer torpes, pero esta vez es principalmente debido a las limitaciones del hardware, ya que tienen mucha menos articulación que un humano.
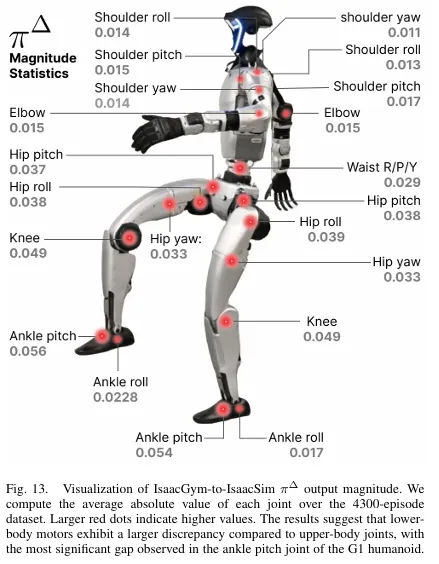
Sin embargo, tienen más destreza que otros robots gracias al “modelo de acción delta”, un mecanismo de corrección que compensa las diferencias entre la física simulada y la del mundo real. “El modelo de acción delta sirve efectivamente como un término de corrección residual para la brecha dinámica”.
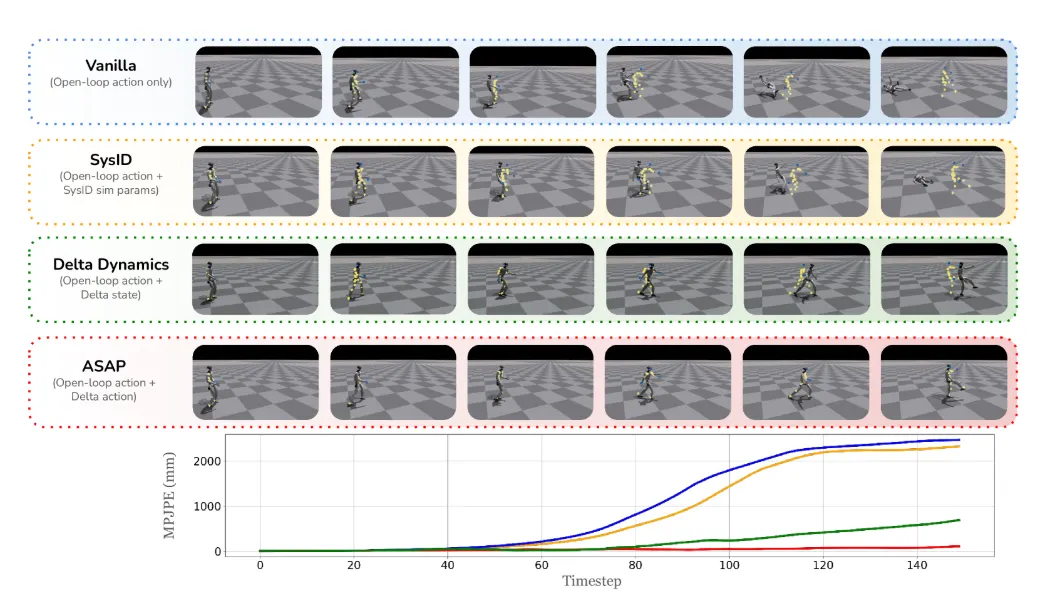
Usando este enfoque, los investigadores redujeron los errores de seguimiento hasta en un 52,7% en comparación con métodos anteriores, permitiendo que los robots realicen movimientos complejos que antes eran imposibles.
“Nuestro enfoque mejora significativamente la agilidad y la coordinación de todo el cuerpo a través de varios movimientos dinámicos”, señalaron los investigadores, quienes demostraron que la efectividad del sistema está “allanando el camino para robots humanoides versátiles en aplicaciones del mundo real”.
Desarrollar robots con este nivel de destreza es particularmente difícil y ha sido uno de los desafíos más persistentes en la robótica.
“Durante décadas, hemos imaginado robots humanoides alcanzando o incluso superando la agilidad a nivel humano. Sin embargo, la mayoría del trabajo previo se ha centrado principalmente en la locomoción, tratando las piernas como un medio de movilidad”, escribieron los investigadores.
ASAP, por otro lado, imita el cuerpo humano en preentrenamiento y es capaz de adaptar su conocimiento a escenarios del mundo real después de aprenderlo en simulaciones.
De esta manera, las extremidades del robot se comportan como extremidades humanas, siendo utilizadas para movimiento, equilibrio, contrapeso, expresión y más.
Lograr esto es mucho más difícil de lo que parece. Cuando realizamos movimientos atléticos —e incluso básicos—, en realidad estamos orquestando innumerables ajustes sutiles en tiempo real, equilibrando múltiples fuerzas mientras compensamos cambios en el impulso y la posición.
Lograr que los robots repliquen esto ha resultado extraordinariamente difícil.
¿No nos crees? Intenta jugar QWOP, un juego en el que tienes que controlar 4 articulaciones para hacer que un atleta corra. Ahora, una vez que hayas pasado horas dominando ese juego, piensa en lo difícil que sería manejar simultáneamente las 21 articulaciones básicas que maneja ASAP —y luego considera que el cuerpo humano tiene más de 300 articulaciones diferentes.
El campo de la robótica humanoide ha estado activo en los últimos años, con empresas y universidades destinando más recursos a I+D.
El proyecto Optimus de Tesla, el reciente anuncio del robot humanoide de Figure AI y Atlas de Boston Dynamics han destacado el creciente interés comercial en robots humanoides.
En el área académica, la Universidad de Bristol y Stanford también han desarrollado sus propios métodos para enseñar a los modelos a ser más ágiles y aumentar su destreza.
El equipo está enfocado en seguir desarrollando ASAP.
“Las direcciones futuras podrían centrarse en desarrollar arquitecturas de políticas conscientes del daño para mitigar los riesgos de hardware”, dijeron, refiriéndose a cómo algunos modelos se rompieron mientras intentaban realizar movimientos complejos.
También quieren investigar “el aprovechamiento de la estimación de pose sin marcadores o la fusión de sensores a bordo para reducir la dependencia de los sistemas MoCap” y mejorar sus técnicas de adaptación para lograr una mayor eficiencia.
¿Cuánto faltará para que tengamos una Copa Mundial completamente robótica?
Editado por Sebastian Sinclair y Josh Quittner.