
En Resumen
- El robot humanoide fue entrenado en movimientos de baile expresivos utilizando videos de personas bailando y captura de movimiento.
- El objetivo principal del proyecto era mejorar la interacción humano-robot y cambiar la percepción pública de los robots como amigables y colaborativos.
- El equipo desarrolló un enfoque de "Control Expresivo de Cuerpo Completo" para permitir al robot moverse de manera estable en diversas superficies y realizar gestos con su cuerpo superior.
Los rápidos avances en robótica pueden generar una percepción "aterradora", por lo que un equipo de ingenieros de la Universidad de California San Diego está enseñando a un robot humanoide a realizar movimientos de baile expresivos. Este enfoque no solo busca mejorar la movilidad y agilidad del robot, sino también hacerlo más acogedor en entornos humanos.
El equipo, liderado por Xiaolong Wang, un profesor del Departamento de Ingeniería Eléctrica y Computación de la Escuela de Ingeniería Jacobs de la UC San Diego, utilizó videos de personas bailando y tecnología de captura de movimiento para entrenar la parte superior del robot.
Más allá de las mejoras en movilidad, la idea era hacer que los robots parecieran más naturales.
"Buscamos construir confianza y mostrar el potencial para que los robots coexistan en armonía con los humanos", dijo Wang en un informe publicado por la universidad. "Estamos trabajando para ayudar a remodelar las percepciones públicas de los robots como amigables y colaborativos en lugar de aterradores como los de Terminator."
El objetivo de la investigación es mejorar las interacciones humano-robot, con posibles implicaciones para diversos entornos, incluidas las líneas de ensamblaje de fábrica, hospitales, hogares y entornos peligrosos como laboratorios y sitios de desastre.
Como se explica en el artículo de investigación del proyecto, el proceso de entrenamiento involucró un enfoque de dos puntas. El cuerpo superior del robot fue entrenado para realizar movimientos expresivos utilizando datos de captura de movimiento y videos de baile, mientras que el cuerpo inferior se centró simplemente en la estabilidad y el equilibrio.
"Nuestra idea clave es no imitar exactamente el mismo movimiento de referencia", explica el artículo de investigación. "Durante el entrenamiento... animamos al cuerpo superior del robot humanoide a imitar diversos movimientos humanos para la expresividad, mientras relajamos el término de imitación de movimiento para sus dos piernas".
Este método permitió que el robot replicara varios movimientos de referencia, como bailar, saludar, chocar las manos y abrazar, mientras sus piernas podían mantener el equilibrio y la estabilidad durante esos movimientos.
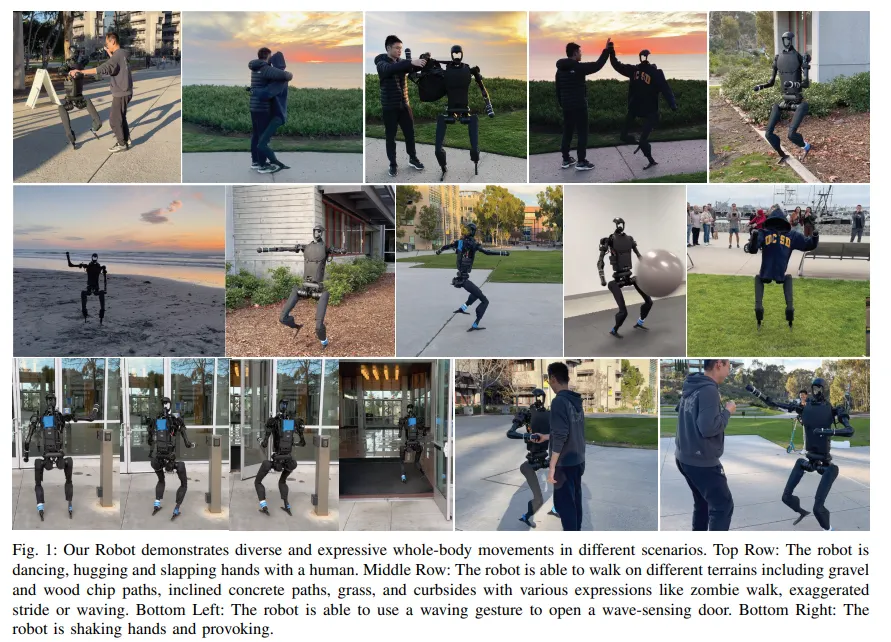
A pesar del entrenamiento separado del cuerpo superior e inferior, el robot aplica su conocimiento para controlar toda su estructura como una sola unidad. Este enfoque, que los investigadores llamaron "Control Expresivo de Cuerpo Completo", permitió que el robot se moviera de manera estable en superficies como grava, tierra, virutas de madera, césped y caminos de concreto inclinados, incluso mientras realizaba diferentes gestos con su cuerpo superior.
El equipo utilizó este enfoque para hacer que el robot fuera capaz de adaptarse a diferentes condiciones, incluso aquellas que no estaban en el conjunto de datos de entrenamiento.
“Entrenamos nuestra política en terrenos desafiantes, y altamente aleatorios en simulación”, dijeron los investigadores. “Esto no solo permite una transferencia robusta de simulación a realidad, sino que también aprende una política que no solo ‘repite’ el movimiento dado.”
Los beneficios potenciales de esta investigación podrían ser de gran alcance. En entornos como hospitales y hogares, los robots con mayor expresividad y agilidad podrían brindar asistencia y compañía, mejorando potencialmente la calidad de vida de los pacientes y las personas mayores. En entornos peligrosos, estos robots podrían reemplazar a los humanos en tareas peligrosas, mejorando la seguridad.
Este proyecto no está aislado en su búsqueda de una mejor movilidad de robots. En la Universidad Rice, los científicos han creado un programa interactivo llamado “Aprendizaje Bayesiano en la Oscuridad” (BLIND) para ayudar a robots complejos en la planificación de movimiento dentro de entornos llenos de obstáculos. Mientras tanto, los investigadores han desarrollado un robot de cuatro patas capaz de correr sobre arena más rápido que lo que los humanos pueden trotar en terreno sólido, demostrando el potencial para que los robots mantengan estabilidad y eficiencia en terrenos mixtos.
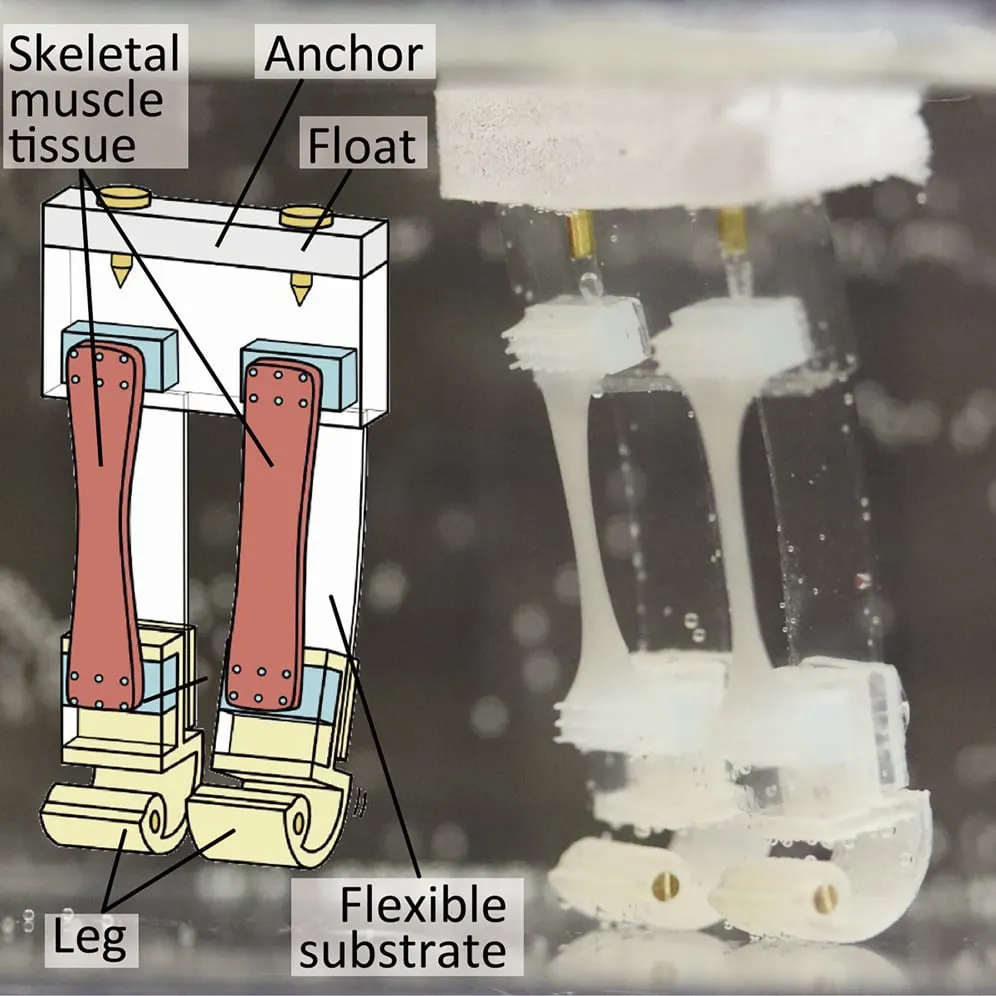
Otro equipo de investigadores desarrolló recientemente un diseño de robot que imita el tejido muscular esquelético para construir robots bípedos más capaces.
Mirando hacia el futuro, Wang y su equipo tienen como objetivo refinar el diseño del robot para realizar tareas más intrincadas y detalladas. Planean equipar a los robots con cámaras para su operación autónoma y una mayor adaptabilidad a diferentes entornos.
"Al ampliar las capacidades del cuerpo superior, podemos expandir el rango de movimientos y gestos que el robot puede realizar", dijo Wang.
Editado por Ryan Ozawa.